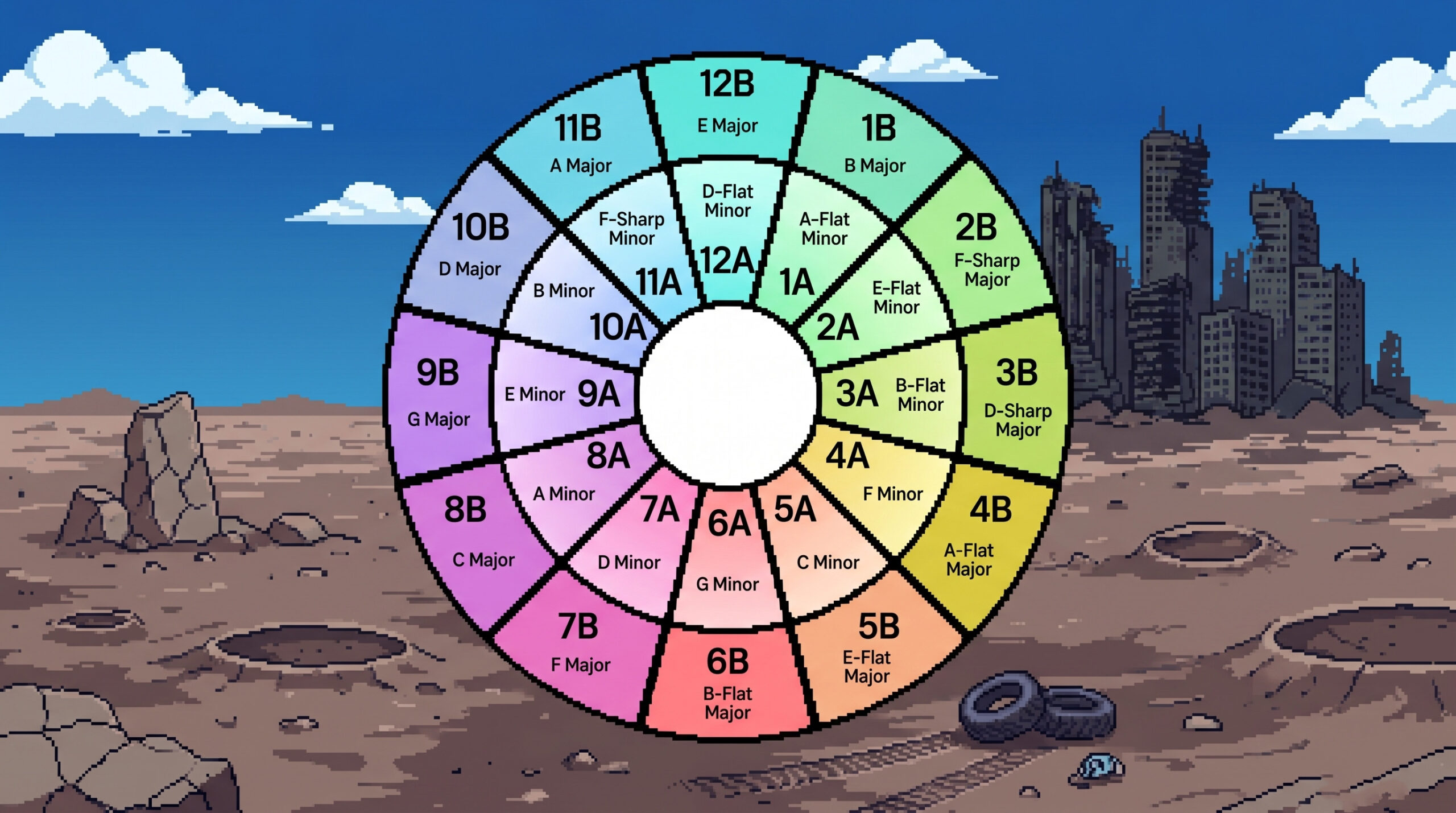
Dynamic Generative Music: Bringing the Camelot Wheel to Godot
Discover how to use the DJ's Camelot Wheel for generative game music. Explore our implementation of a synchronized 4-stem audio…
Music and Technology
Discover how to use the DJ's Camelot Wheel for generative game music. Explore our implementation of a synchronized 4-stem audio…
It is cold here, standing naked and alone. I watch the skimming stone fly over deep and dark waters, Seeing…
Nocturne of Shadows by cerkit Engine Overview MUSE loads song descriptions from JSON and turns them into MIDI compositions. The…
Programming music directly into an FPGA can feel like a grind—especially if you’re hand-coding note tables and timing values. When…
Creating a physical music product in the digital age can be a rewarding way to connect with listeners. Here’s how…
Welcome to this step-by-step walkthrough of how we created a beautiful, responsive USB music playlist viewer using only web technologies.…
Up until this weekend, I had never learned how to use a groovebox. My computerrecently died, so I decided that…
I have been learning how to use my VR headset to be more creative. I spent the first big weekend…
I recently spent some time with my digital audio workstation (DAW) putting together a heavily delayed feedback loop on the…
In this post, I will demonstrate how I converted a Haiku into algorithmic music using a context free grammar. In…