A Relaxing Passtime – Rolife Tiny Buildings
I have been assembling miniature buildings lately. They are from Rolife.
Music and Technology
I have been assembling miniature buildings lately. They are from Rolife.
Good and bad, cerkit.com has been a great personal outlet.
Discover how the π π-calculus (pi-calculus)—a formal mathematical framework for concurrent systems—can be applied to web development. Explore a detailed…
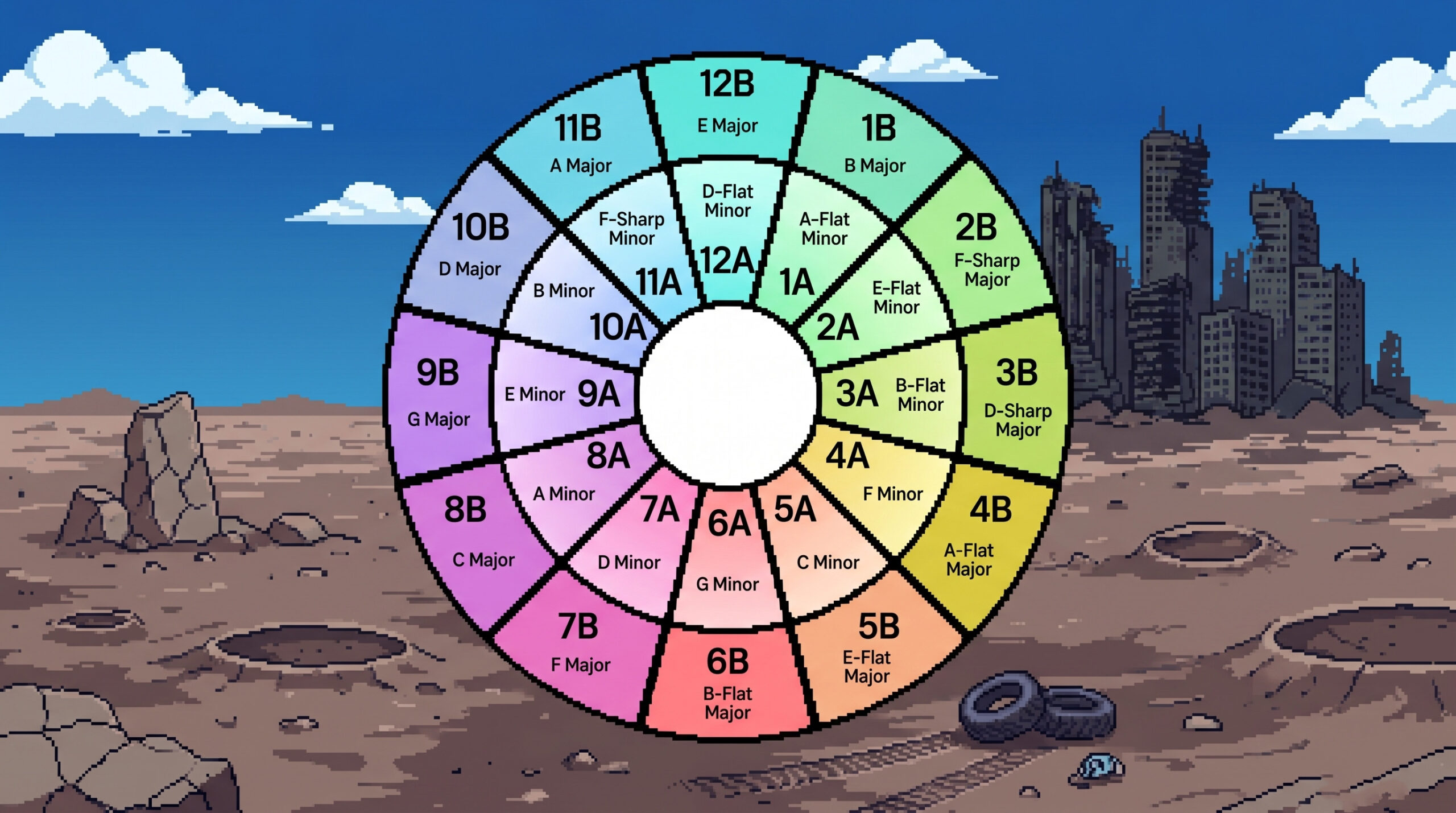
Discover why I transitioned my generative music system from rigid Camelot numbers to a flexible, theme-based naming convention. Learn how…
Discover how to use the DJ's Camelot Wheel for generative game music. Explore our implementation of a synchronized 4-stem audio…
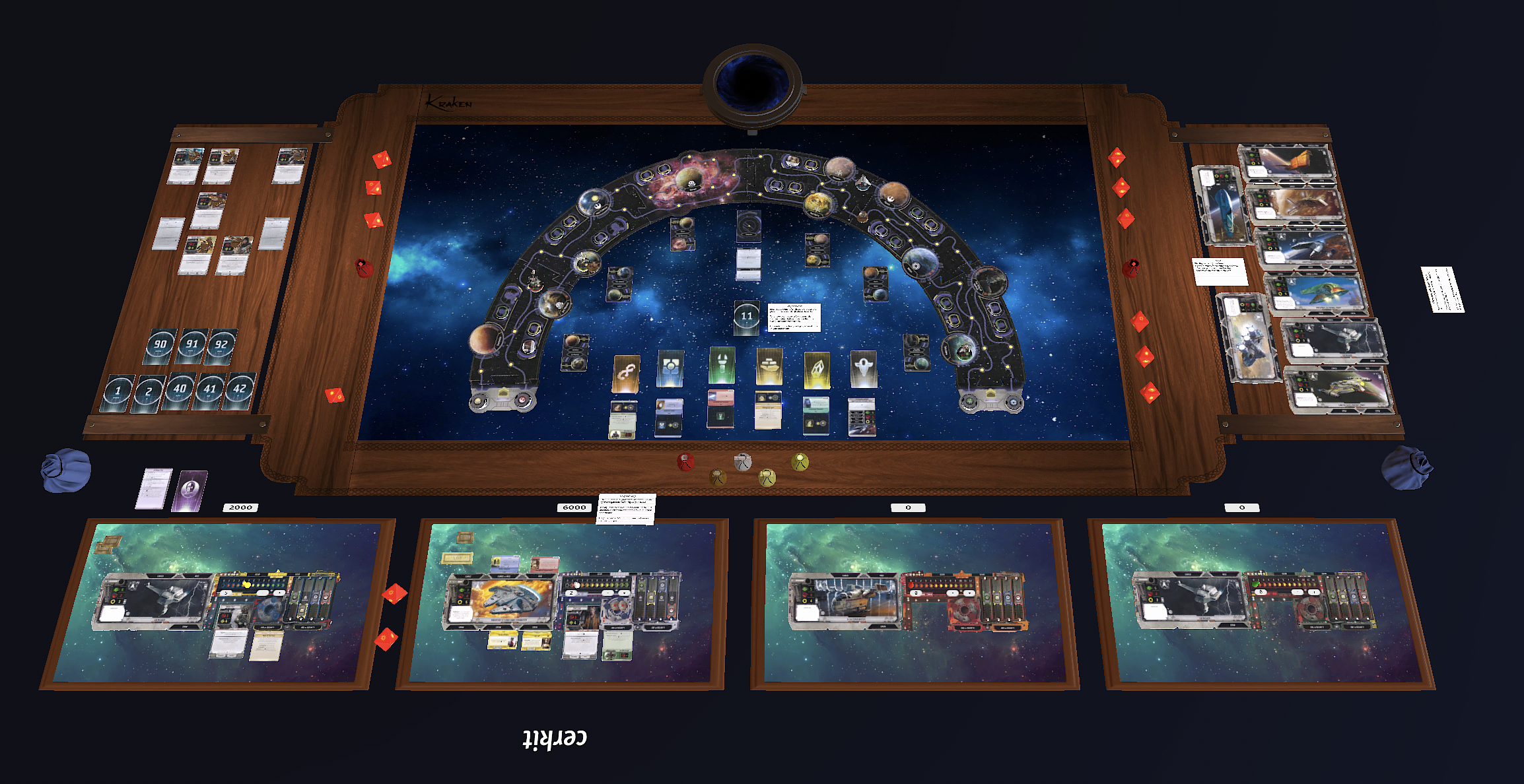
I love being a galactic scoundrel in Star Wars: Outer Rim, but I've always dreaded the massive table setup and…
Get a sneak peek into the practice session for the upcoming performance at Magic City Art Connection in Birmingham, AL.
Learn how to build a custom Arduino MEGA MIDI Man-in-the-Middle (MITM) device that inverts incoming notes, letting you play any…
Discover how mirroring the piano keyboard around the axis of D can transform the playing experience for left-handed musicians. Learn…
The Three Me's" is a proven strategy for making good decisions. Explore this mental framework to navigate dilemmas, balance priorities,…