Dynamic Generative Music: Bringing the Camelot Wheel to Godot
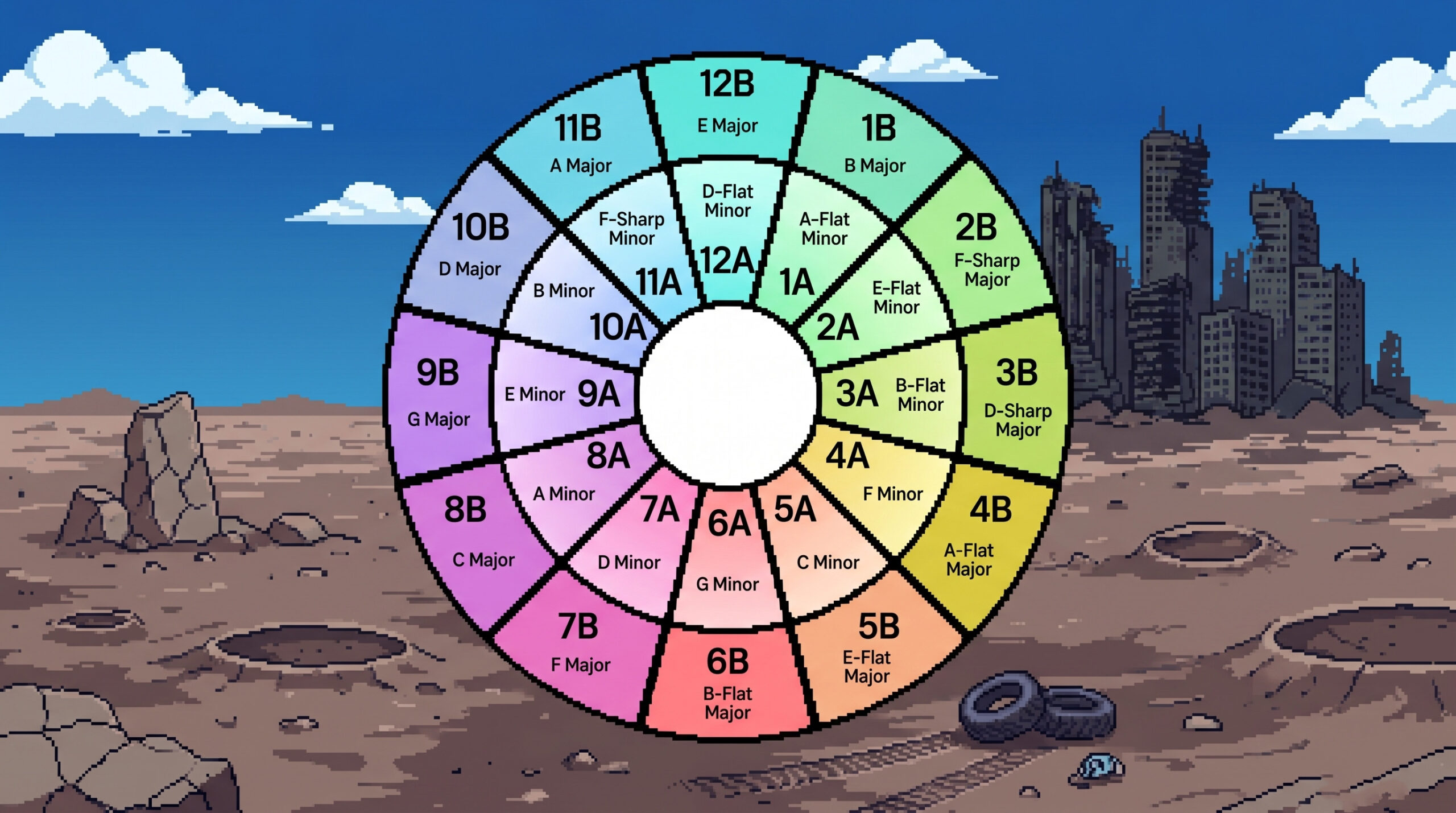
Discover how to use the DJ's Camelot Wheel for generative game music. Explore our implementation of a synchronized 4-stem audio…
Music and Technology
Discover how to use the DJ's Camelot Wheel for generative game music. Explore our implementation of a synchronized 4-stem audio…
View full size Get the Code Code available on GitHub Under the Hood: How Shader Studio Brings Code to Life…
I have designed a simple context-free grammar using Psalm 71:22 to drive the creation of a song. I decided to…
In a [previous blog post](/posts/running-a-net-core-2-0-webapi-app-on-the-raspberry-pi-raspbian/), I discussed how to create a dotnet core 2.0 WebApi application to run on the…
I wanted to create a web api app that answered calls on my Raspberry Pi. The first step I learned…
A few months ago, I had an idea to create a new musical instrument that mounted on a glove. I…
A few years ago, I bought a Pebble smartwatch. Mostly I bought it because it was cheap, but I also…
In my previous post, I talked about how I implemented a binary counter with my Mojo FPGA board. I am…
